
Kinematika Pada Gerak Melengkung Sebidang ( Article 2/2 )
Sumber
Mekanika Teknik - Dinamika (Edisi Kesembilan)
Karya
- JL MERIAM
- LG KRAIGE
- J.N. BOLTON
- Rectilinear motion
- Curvilinear motion
- Combined rectilinear and rotational motion
Kita sekarang membahas gerak suatu partikel sepanjang lintasan lengkung yang terletak pada satu bidang. Gerak ini merupakan kasus khusus dari gerak tiga dimensi yang lebih umum yang diperkenalkan dalam Artikel . 2∕1 dan diilustrasikan pada Gambar 2∕1. Misalnya, jika kita membiarkan bidang gerak menjadi bidang xy, maka koordinat z dan 𝜙 pada Gambar 2∕1 keduanya nol, dan R menjadi sama dengan r. Seperti disebutkan sebelumnya, sebagian besar gerakan titik atau partikel yang ditemui dalam praktik teknik dapat direpresentasikan sebagai gerakan bidang.

Sebelum menjelaskan gerak lengkung bidang pada himpunan koordinat tertentu, pertama-tama kita akan menggunakan analisis vektor untuk mendeskripsikan gerak tersebut, karena hasilnya tidak bergantung pada sistem koordinat tertentu. Artikel berikut ini merupakan salah satu konsep paling dasar dalam dinamika, yaitu turunan waktu dari sebuah vektor. Banyak analisis dalam dinamika menggunakan laju perubahan besaran vektor terhadap waktu. Oleh karena itu Anda disarankan untuk menguasai topik ini sejak awal karena Anda akan sering menggunakannya.
Sekarang perhatikan gerak kontinyu sebuah partikel sepanjang kurva bidang seperti yang ditunjukkan pada Gambar 2∕5.

Pada waktu t, partikel berada pada posisi A, yang terletak pada vektor posisi r yang diukur dari titik asal tetap yang sesuai O. Jika besar dan arah r diketahui pada waktu t, maka posisi partikel tersebut adalah sepenuhnya ditentukan.
Pada waktu t + Δt, partikel berada di A′, terletak pada vektor posisi r + Δr. Tentu saja kita perhatikan bahwa kombinasi ini adalah penjumlahan vektor dan bukan penjumlahan skalar.
Perpindahan partikel selama waktu Δt adalah vektor Δr yang mewakili vektor perubahan posisi dan jelas tidak bergantung pada pilihan titik asal.
Jika suatu titik asal dipilih pada lokasi yang berbeda, vektor posisi r akan berubah, tetapi Δr tidak akan berubah.
Jarak sebenarnya yang ditempuh partikel ketika bergerak sepanjang lintasan dari A ke A′ adalah panjang skalar Δs yang diukur sepanjang lintasan. Jadi, kita membedakan antara perpindahan vektor Δr dan jarak skalar Δs.
Perpindahan partikel dalam waktu ∆t adalah vektor ∆r yang merupakan perubahan-perubahan vektor tempat. Sedangkan jarak sebenarnya yang dicapai partikel ketika berpindah dari A ke A’ adalah panjang skalar ∆s yang diukur sepanjang lintasan.
-------
Kecepatan
Kecepatan rata-rata partikel antara A dan A′ didefinisikan sebagai
yaitu vektor yang arahnya Δr dan besarnya adalah besaran Δr dibagi Δt.
Kecepatan rata-rata partikel antara A dan A′ adalah hasil bagi skalar Δs∕Δt. Jelasnya, besarnya kecepatan rata-rata dan kecepatan saling mendekat seiring dengan berkurangnya interval Δt dan A dan A′ semakin berdekatan.
Kecepatan sesaat v partikel didefinisikan sebagai nilai batas kecepatan rata-rata pada selang waktu mendekati nol. Dengan demikian,
Kita mengamati bahwa arah Δr mendekati garis singgung lintasan ketika Δt mendekati nol dan, dengan demikian, kecepatan v selalu merupakan vektor yang bersinggungan dengan lintasan.
Sekarang kita memperluas definisi dasar turunan besaran skalar dengan memasukkan besaran vektor dan menulisnya
Turunan suatu vektor sendiri merupakan suatu vektor yang mempunyai besar dan arah.
Besarnya v disebut kecepatan dan merupakan skalar
Pada titik ini kita membuat perbedaan yang cermat antara besaran turunan dan turunan besaran. Besaran turunan dapat ditulis dengan salah satu dari beberapa cara |dr∕dt| = |r˙| = s˙ = |v| = v dan mewakili besarnya kecepatan, atau kecepatan, partikel. Sebaliknya, turunan dari besaran ditulis d|r|∕dt = dr∕dt = r˙, dan mewakili laju perubahan panjang vektor posisi r. Jadi, kedua turunan ini mempunyai dua arti yang sangat berbeda, dan kita harus sangat berhati-hati dalam membedakan keduanya dalam pemikiran dan notasi kita. Untuk alasan ini dan alasan lainnya, Anda disarankan untuk menggunakan notasi yang konsisten untuk pekerjaan tulisan tangan untuk semua besaran vektor guna membedakannya dari besaran skalar.
Dengan terbentuknya konsep kecepatan sebagai vektor, kita kembali ke Gambar 2∕5
dan menyatakan kecepatan partikel di A dengan vektor tangen v dan kecepatan di A′ dengan garis singgung v′. Jelasnya, ada perubahan vektor kecepatan selama waktu Δt. Kecepatan v di A ditambah (secara vektor) perubahan Δv harus sama dengan kecepatan di A′, sehingga kita dapat
tulislah . Pemeriksaan diagram vektor menunjukkan bahwa Δv bergantung pada perubahan besar (panjang) v dan perubahan arah v. Kedua perubahan ini merupakan ciri mendasar dari turunan suatu vektor
---
Percepatan
Percepatan rata-rata partikel antara A dan A′ didefinisikan sebagai Δv∕Δt, yang merupakan vektor yang arahnya adalah Δv. Besarnya percepatan rata-rata ini adalah besarnya Δv dibagi Δt.
Percepatan sesaat a suatu partikel didefinisikan sebagai nilai batas percepatan rata-rata pada selang waktu mendekati nol. Dengan demikian,
Maka, berdasarkan definisi turunannya, kita tuliskan
Ketika interval Δt menjadi lebih kecil dan mendekati nol, arah perubahan Δv mendekati arah perubahan diferensial dv dan, dengan demikian, a. Jadi, percepatan a mencakup pengaruh perubahan besaran v dan perubahan arah v. Secara umum jelas bahwa arah percepatan suatu partikel yang bergerak lengkung tidak bersinggungan dengan lintasan. atau normal pada jalurnya.Namun kita mengamati bahwa komponen percepatan yang tegak lurus terhadap titik lintasan mengarah ke pusat kelengkungan lintasan.

Visualisasi Gerak
Pendekatan lebih lanjut terhadap visualisasi percepatan ditunjukkan pada Gambar 2∕6,
di mana vektor posisi ke tiga posisi sembarang pada jalur partikel ditampilkan untuk tujuan ilustrasi. Terdapat vektor kecepatan yang bersinggungan dengan lintasan yang berhubungan dengan setiap vektor posisi, dan hubungannya adalah v = r˙. Jika vektor-vektor kecepatan ini diplot dari suatu titik sembarang C, maka akan terbentuk sebuah kurva yang disebut hodograf. Turunan dari vektor kecepatan tersebut adalah vektor percepatan a = v˙ yang bersinggungan dengan hodograf. Kita melihat bahwa percepatan mempunyai hubungan yang sama dengan kecepatan seperti halnya kecepatan terhadap vektor posisi.
Penggambaran geometris turunan vektor posisi r dan vektor kecepatan v pada Gambar 2∕5

dapat digunakan untuk mendeskripsikan turunan besaran vektor apa pun terhadap t atau terhadap variabel skalar lainnya. Sekarang kita telah menggunakan definisi kecepatan dan percepatan untuk memperkenalkan konsep turunan vektor, penting untuk menetapkan aturan untuk membedakan besaran vektor.
Tiga sistem koordinat berbeda yang biasa digunakan untuk menggambarkan hubungan vektor gerak lengkung suatu partikel dalam suatu bidang: koordinat persegi panjang, koordinat normal dan tangensial, dan koordinat kutub. Pelajaran penting yang dapat dipetik dari studi sistem koordinat ini adalah pemilihan sistem referensi yang tepat untuk suatu masalah tertentu. Pilihan ini biasanya terungkap melalui cara di mana gerakan dihasilkan atau melalui bentuk data yang ditentukan. Masing-masing dari tiga sistem koordinat sekarang akan dikembangkan dan diilustrasikan.
------
Koordinat Persegi Panjang (x-y)
Sistem koordinat ini sangat berguna untuk menggambarkan gerakan di mana komponen percepatan x dan y dihasilkan atau ditentukan secara independen. Gerak lengkung yang dihasilkan kemudian diperoleh dengan kombinasi vektor komponen x dan y dari vektor posisi, kecepatan, dan percepatan.
Representasi Vektor
Jalur partikel pada Gambar 2∕5 ditunjukkan lagi pada Gambar 2∕7
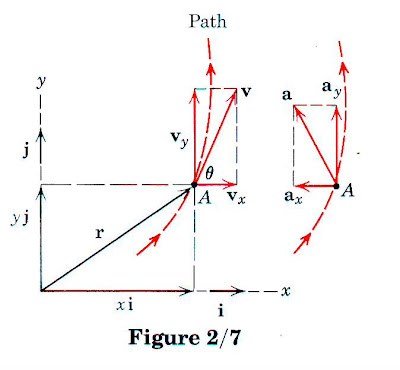
bersama dengan sumbu x dan y. Vektor posisi r, kecepatan v, dan percepatan a partikel sebagaimana dikembangkan dalam Artikel. 2∕3 direpresentasikan pada Gambar. 2∕7 bersama dengan komponen x dan y -nya.
i dan j adalah vektor satuan kearah sumbu x dan y. Karena sifatnya selalu konstan maka tidak dipengaruhi oleh waktu, dengan demikian tidak memiliki turunan terhadap waktu.
x dan y adalah perpindahan kearah sumbu x dan y, merupakan fungsi waktu, sehingga memiliki turunan terhadap waktu
Dengan bantuan vektor satuan i dan j, kita dapat menuliskan vektor r, v, dan a dalam komponen x dan y. Dengan demikian,
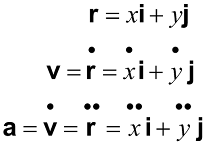
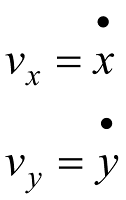
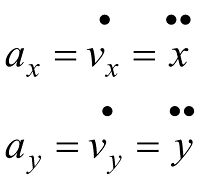
Saat kita melakukan diferensiasi terhadap waktu, kita mengamati bahwa turunan waktu dari vektor satuan adalah nol karena besar dan arahnya tetap. Nilai skalar komponen v dan a hanyalah
(Seperti yang digambarkan pada Gambar 2∕7, sumbu berada pada arah x negatif, sehingga x¨ adalah bilangan negatif.)
Seperti telah diamati sebelumnya, arah kecepatan selalu bersinggungan dengan lintasan, dan dari gambar tersebut terlihat jelas bahwa

Gerakan Proyektil
Penerapan penting teori kinematik dua dimensi adalah masalah gerak proyektil. Untuk pembahasan pertama pada subjek, kita mengabaikan gaya tarik aerodinamis serta kelengkungan dan rotasi bumi, dan kita berasumsi bahwa perubahan ketinggian cukup kecil sehingga percepatan gravitasi dapat dianggap konstan. Dengan asumsi tersebut, koordinat persegi panjang berguna untuk analisis lintasan.
Untuk sumbu yang ditunjukkan pada Gambar 2∕8,

komponen percepatannya adalah
Integrasi percepatan ini mengikuti hasil yang diperoleh sebelumnya dalam Art. 2 ∕ 2a untuk percepatan dan hasil yang konstan

Dalam semua ekspresi ini, angka nol di bawah menunjukkan kondisi awal, yang sering dianggap sebagai kondisi saat peluncuran dimana, untuk kasus yang diilustrasikan, x0 = y0 = 0. Perhatikan bahwa kuantitas g dianggap positif di seluruh teks ini.
Kita dapat melihat bahwa gerak x dan y tidak bergantung pada kondisi proyektil sederhana yang dipertimbangkan. Penghapusan waktu t antara persamaan perpindahan x dan y menunjukkan lintasan menjadi parabola (lihat Contoh Soal 2∕6). Jika kita memperkenalkan gaya tarik yang bergantung pada kuadrat kecepatan (misalnya), maka gerak x dan y akan berpasangan (saling bergantung), dan lintasannya akan menjadi nonparabola.
Ketika gerak proyektil melibatkan kecepatan besar dan ketinggian, untuk mendapatkan hasil yang akurat kita harus memperhitungkan bentuk proyektil, variasi g terhadap ketinggian, variasi kepadatan udara terhadap ketinggian, dan rotasi bumi. Faktor-faktor ini menimbulkan kompleksitas yang cukup besar ke dalam persamaan gerak, dan integrasi numerik dari persamaan percepatan biasanya diperlukan.
-----------
- r: Jarak dari titik asal
- θ: Sudut dari arah kutub

------
){kind=link}
Posting Komentar untuk "Kinematika Pada Gerak Melengkung Sebidang ( Article 2/2 )"
Posting Komentar